
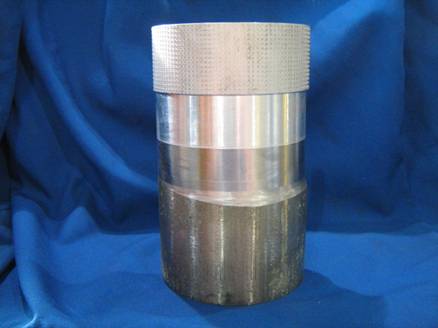
EWI has spent considerable time over the last decade investigating the potential for friction welding aluminum to steel. That work has encompassed both direct drive friction welding, as well as inertia welding. One key element that has been demonstrated in these studies is the need to minimize actual times at temperature during processing. Short thermal cycles have been demonstrated to minimize intermetallic formation, and as a result improving the mechanical integrity of the joint. A resulting large section aluminum to steel weld is shown in Figure 1.
For 6XXX grades of aluminum welded to steel, necessary heating times are observed to be in the 200-ms to 200-ms range. A typical set of process curves (including spindle speed, applied forces, upset distances, and system torques is shown in Figure 2. These curves demonstrate that acceptable welding practices do show deceleration times in the 200-ms to 300-ms range. Further, these results show a relatively linear decrease in spindle speed, and a correspondingly nominal steady state torque throughout the process. These results can be understood by a relatively simple analysis. This is done by directly equating frictional forces to deceleration of the spindle. Integrating the resulting equation from the starting spindle speed to a completely stopped condition yields the relationship shown in Figure 3. Here I is the inertia of the system, μ is an effective coefficient of friction, tdecel is the deceleration time, σf is the applied stress on the workpiece surfaces, wt and dOD are the wall thickness and outside diameter of the workpiece, and vs is the surface velocity.
Generally, σf and vs are material combination specific, and considered constants in the system. wt and dOD are geometric parameters, and specific to the application. The equation, then, suggests that there is a linear relationship between the system inertia used and the resulting deceleration time. Since tdecel is, based on experimental work, assigned a value between 200-ms and 300-ms, necessary intertias for aluminum to steel welding can be straight forwardly determined. Of interest, this calculation is based on the estimated value for the effective coefficient of friction μ. Experimental results suggest that that value is typically in the 0.1 – 0.15 range. This number has been surprisingly consistent over several programs run at EWI. Of further interest, it is also consistent with values taken from the friction stir welding arena, where aluminum alloys are welded with steel tools.

Results suggest that necessary inertias for aluminum to steel welding scale strongly with part diameter and wall thickness. However, those inertias, particularly for larger components, are considerably smaller than current recommended practices for similar materials joining would suggest.