Recent advances in robotic technology have allowed manufacturers to use automated bin picking for increasingly challenging applications to improve overall productivity. These applications can be divided into three cases based on the degrees of freedom of motion of the parts in a bin: (1) random, (2) semi-structured, and (3) structured. Robotic random bin picking is the most challenging of these applications, whereby an automated system individually loads randomly stacked parts from a bin into a consecutive process.
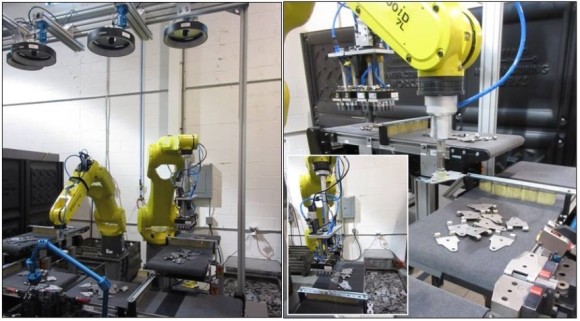
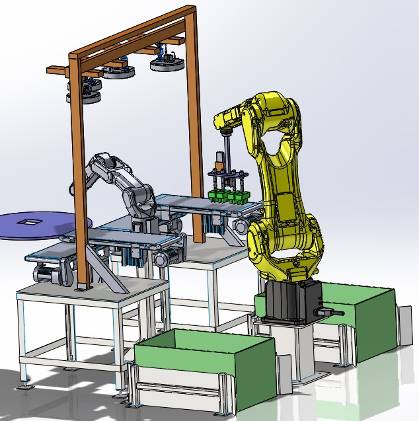
“Random Bin Picking in Industrial Automation,” written by EWI Applications Engineer Seungkook Jun, provides an overview of the design, construction, and demonstration of a robotic random bin picking system that creates a semi-structured system from a random environment.
To read the complete paper, click here.
To learn more about EWI initiatives in advanced automation, contact Ron Brown at [email protected] or click here.